Overview of Two-Sided Line Model (TSLM) Applications [ex404.0]¶
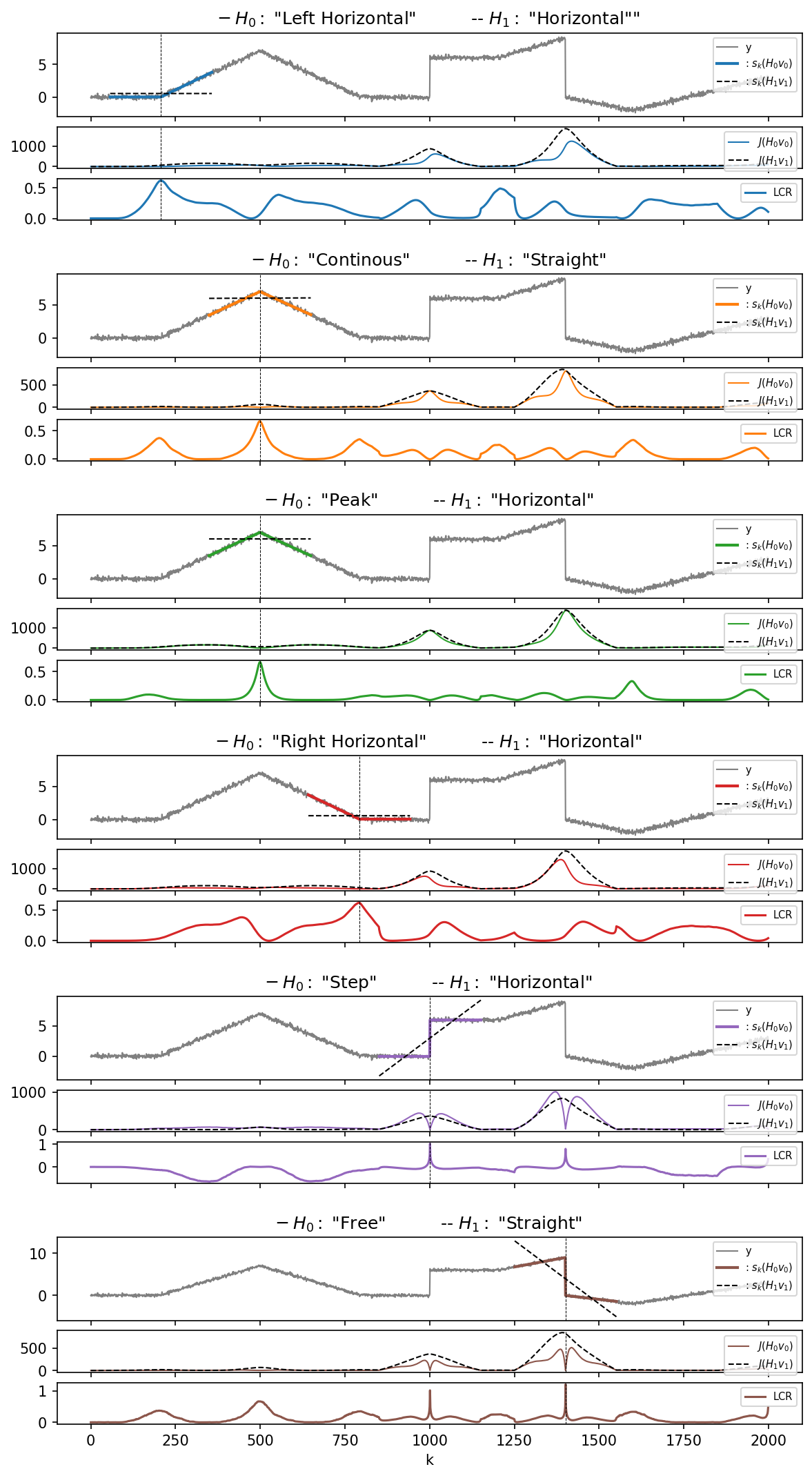
Compares multiple Two-Sided Line Model (TSLM) constraint types on a piecewise-linear test signal; cf. [Waldmann2022].
For each pair of hypothesis constraints (H0, H1), the Log-Cost Ratio (LCR) is computed and plotted. The constraint pairs tested are:
- Left Horizontal vs. Horizontal
- Continuous vs. Straight
- Peak vs. Horizontal
- Right Horizontal vs. Horizontal
- Step vs. Straight
- Free vs. Straight
Each LCR highlights a different class of changepoints (edges, peaks, steps, etc.) in the signal.
Plot¶
Console Output¶
CompositeCost(label=TSLM)
└- ['AlssmPoly(A=[[1 1] [0 1]], C=[1 0], label=left line model)', 'AlssmPoly(A=[[1 1] [0 1]], C=[1 0], label=right line model)'],
└- ['Segment(a=-150, b=-1, direction=fw, g=50, delta=0, label=left segment)', 'Segment(a=0, b=150, direction=bw, g=50, delta=0, label=right segment)']
Code¶
r"""
Overview of Two-Sided Line Model (TSLM) Applications [ex404.0]
===============================================================
Compares multiple Two-Sided Line Model (TSLM) constraint types on a
piecewise-linear test signal; cf. [\[Waldmann2022\]](../../../bibliography.md#waldmann2022).
For each pair of hypothesis constraints (H0, H1), the Log-Cost Ratio
(LCR) is computed and plotted. The constraint pairs tested are:
* Left Horizontal vs. Horizontal
* Continuous vs. Straight
* Peak vs. Horizontal
* Right Horizontal vs. Horizontal
* Step vs. Straight
* Free vs. Straight
Each LCR highlights a different class of changepoints (edges, peaks, steps,
etc.) in the signal.
"""
import lmlib as lm
import numpy as np
import matplotlib.pyplot as plt
from lmlib.utils import gen_slopes, gen_wgn
K = 2000
ks = [200, 500, 800, 1000, 1001, 1200, 1400, 1401, 1600, 2000]
deltas = [0, 7, -7, 0, 6, 0, 3, -9, -2, 5]
y = gen_slopes(K, ks, deltas) + gen_wgn(K, 2e-1, seed=31415921)
H0s_Labels = ['"Left Horizontal"', '"Continous"', '"Peak"', '"Right Horizontal"', '"Step"', '"Free"']
H0s = [lm.TSLM.H_Left_Horizontal, lm.TSLM.H_Continuous, lm.TSLM.H_Peak, lm.TSLM.H_Right_Horizontal, lm.TSLM.H_Step, lm.TSLM.H_Free]
H1s_Labels = ['"Horizontal""', '"Straight"', '"Horizontal"', '"Horizontal"', '"Horizontal"', '"Straight"']
H1s = [lm.TSLM.H_Horizontal, lm.TSLM.H_Straight, lm.TSLM.H_Horizontal, lm.TSLM.H_Horizontal, lm.TSLM.H_Straight, lm.TSLM.H_Straight]
M = len(H0s_Labels)
colors0 = plt.colormaps['tab20'].colors[::2]
a = -150
b = 150
cost = lm.TSLM.create_cost(ab=(a, b), gs=(50, 50))
rls = lm.RLSAlssm(cost)
print(cost)
fig, axs = plt.subplots(4*M-1, sharex='all', figsize=(8, 14), gridspec_kw={'height_ratios': [2.0, 1, 1]+[0.8, 2.0, 1, 1]*(M-1)})
fig.subplots_adjust(left=0.08, right=.98, top=.98, bottom=0.02)
i = 0 # iteration counter
iaxs = 0 # axis counter
for H0, H1, c0, name0, name1 in zip(H0s, H1s, colors0, H0s_Labels, H1s_Labels):
rls.filter(y)
xs_0 = rls.minimize_x(H=H0)
xs_1 = rls.minimize_x(H=H1)
J_0 = rls.eval_errors(xs_0)
J_1 = rls.eval_errors(xs_1)
LCR = -0.5 * np.log10(J_0 / J_1)
ks_range = np.arange(K)
ks_max = ks_range[[np.nanargmax(LCR)]]
trajs_0 = lm.Trajectory.eval_y(cost, xs_0, ks_max, K, merged_ks=True, merged_seg=True)
trajs_1 = lm.Trajectory.eval_y(cost, xs_1[ks_max], ks_max, K)
# add spacer between subplots
if i>0:
axs[iaxs].set_visible(False)
iaxs += 1
axs[iaxs].set_title("─ $H_0:$ "+name0 + ' ' + "-- $H_1:$ "+name1)
axs[iaxs].plot(y, c=(0.5,)*3, lw=1.0, label='y')
axs[iaxs].plot(trajs_0, c=c0, lw=2.0, label=r': $s_k(H_0 v_0)$')
axs[iaxs].plot(trajs_1, c='k', ls='--', lw=1.00, label=r': $s_k(H_1 v_1)$')
axs[iaxs].legend(loc=1, fontsize=7)
axs[iaxs].axvline(x=ks_max, ls='--', c='k', lw=0.5)
iaxs += 1
axs[iaxs].plot(ks_range, J_0[ks_range], c=c0, ls='-', lw=1, label='$J(H_0 v_0)$')
axs[iaxs].plot(ks_range, J_1[ks_range], c='k', ls='--', lw=1, label='$J(H_1 v_1)$')
axs[iaxs].axvline(x=ks_max, ls='--', c='k', lw=0.5)
axs[iaxs].legend(loc=1, fontsize=7)
iaxs += 1
axs[iaxs].plot(ks_range, LCR[ks_range], c=c0, ls='-', lw=1.5, label= 'LCR')
axs[iaxs].legend(loc=1, fontsize=7)
axs[iaxs].axvline(x=ks_max, ls='--', c='k', lw=0.5)
iaxs += 1
i+=1
axs[-1].set_xlabel('k')
plt.show()